Stage 1: Image Capture
Video Capture Workflow (Recommended)
📱
1. Record Video
3 orbits, 3 angles
🎬
2. Extract Frames
FFmpeg (adjust fps)
📁
3. Feed to COLMAP
Ordered sequence
Coverage: 3 Orbits × 3 Camera Angles
- 1. Crouching ↑ — capture under chin
- 2. Standing → — eye level
- 3. Arms up, aim ↓ — top of head
Walk slowly! Adjacent frames need 70% shared content.
100+
frames min
1080p+
resolution
3
angles
What is "overlap"?
Adjacent frames must share ~70% of visible content. This means walking slowly—if you turn too fast, consecutive frames have no common features and COLMAP can't triangulate.
Subject Pose: T-Pose
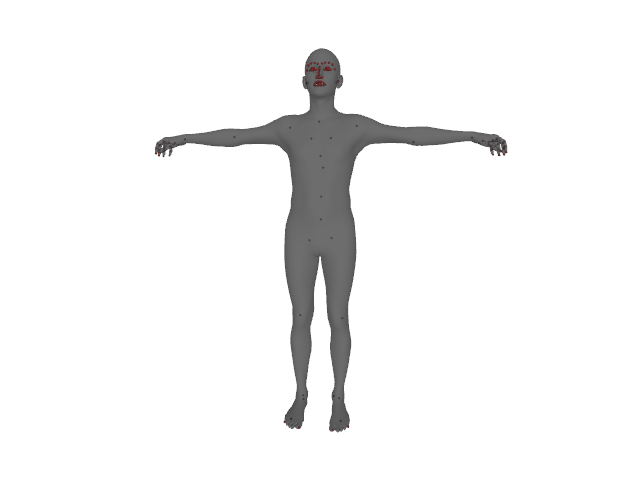
Why T-Pose?
- • Color coverage: Exposes underarms, inner arms, sides
- • Matches SMPL-X default pose
- • Minimizes self-occlusion
- • Best for motion retargeting
Avoid These Mistakes
- ✗ Subject moving during capture
- ✗ Arms at sides / hands in pockets
- ✗ Harsh shadows / mixed lighting
- ✗ Gaps in coverage
Stage 2: COLMAP Reconstruction
1
Features
2
Match
3
Sparse
4
Undistort
5
Stereo
6
Fusion
7
Mesh
# Feature extraction (with optional mask path) colmap feature_extractor --database_path db.db --image_path ./images \ --ImageReader.camera_model SIMPLE_RADIAL --ImageReader.single_camera 1 \ --ImageReader.mask_path ./masks/ # optional # Matching: try sequential first (video), fallback to exhaustive colmap sequential_matcher --database_path db.db --SequentialMatching.overlap 10 # Sparse → Dense → Mesh colmap mapper --database_path db.db --image_path ./images --output_path sparse colmap image_undistorter --input_path sparse/0 --output_path dense colmap patch_match_stereo --workspace_path dense colmap stereo_fusion --workspace_path dense --output_path dense/fused.ply colmap poisson_mesher --input_path dense/fused.ply --output_path dense/mesh.ply \ --PoissonMeshing.depth 12
1. Input Video
2. Segmented

3. Feature Matches
4. Point Cloud
5. 3D Mesh
Optional: Provide Masks
Don't remove backgrounds—black/green bleeds into reconstruction! Provide binary masks via --ImageReader.mask_path
Validation Checklist
After features: 2,000-10,000 per image
After matching: 100-1,000+ matches/pair
After sparse: 70-90% images registered
After fusion: millions of points
Common Failures
<500 features: blurry or textureless
<50% registered: insufficient overlap
Sequential fails: try exhaustive_matcher
Poisson Depth → Vertex Count
depth 8 → ~2K verts (preview)
depth 10 → ~42K verts
depth 11 → ~256K verts
depth 12+ → ~1.4M+ verts ⭐
Key Outputs
sparse/0/ ← camera poses
dense/fused.ply ← point cloud
dense/mesh.ply ← final mesh
Stage 4: SMPL-X Model Fitting
Photos
→
COLMAP
→
Clean
→
SMPL-X Fit
→
Texture
→
Motion
What is SMPL-X?
SMPL eXpressive — unified body model combining SMPL body, FLAME face, MANO hands.
Vertices:10,475
Joints:54
Shape (β):10 params
Body pose:63 params
Hands (PCA):24 params
Expression (ψ):10 params
Chamfer Distance Loss
Lchamfer = 1/|A| Σ min‖a-b‖₂ + 1/|B| Σ min‖b-a‖₂
# Pairwise distances
dist = torch.cdist(smplx_v, scan_v)
loss_s2t = dist.min(dim=1)[0].mean()
loss_t2s = dist.min(dim=0)[0].mean()
chamfer = (loss_s2t + loss_t2s) / 2
SMPL-X Forward Pass
import smplx model = smplx.create( model_path='models/', model_type='smplx', gender='neutral', num_betas=10 ).to(device) output = model( betas=betas, # (1,10) body_pose=pose, # (1,63) global_orient=orient,# (1,3) transl=transl # (1,3) ) vertices = output.vertices # (1,10475,3)
Multi-Stage Optimization
1
Global: orient, transl, scale
2
Shape: β (body proportions)
3
Coarse pose: HIGH regularization
4
Fine pose: lower regularization
5
Joint: all params together
Pose Presets
| Preset | Shoulder Z | Use When |
|---|---|---|
| t-pose ✓ | 0° | Arms horizontal (recommended) |
| a-pose | ±45° | Arms diagonal |
| relaxed | ±72° | Natural standing |